Smalight OSを使おう 8タスク目 タスク管理を使う2 [Smalight OS]
この記事は、某SNSで書いているものを転載しています。
 今回は、前回やり残したタスク管理機構の「tslp_tsk」です。μITRON仕様にも、同じサービスコールが存在します。
今回は、前回やり残したタスク管理機構の「tslp_tsk」です。μITRON仕様にも、同じサービスコールが存在します。
しかしこのサービスコールは既にサンプルプログラムで何度も登場しているので、使い方に付いては既に把握して居らっしゃるかと思います。
このサービスコールは、その名前をご覧頂ければ判る様に、自タスクを待ち状態に遷移する「slp_tsk」に、時間管理機能を付加したもので、先頭の"t"が時間管理機能を表しています。
引数は単位をmsとした相対時間であり、符号付き32bitで表現されますので、最大は0x7fffffffとなります。しかし前から思うのですが、現在のシステムタイマーの値からの相対時間なので、ロールオーバーしちゃったらどうなるんでしょうかね。
動作を説明しますと、このサービスコールを発行することで、自タスクをRUNからWAITに遷移させます。
基本的に「slp_tsk」である事から、別のタスク等から起床要求を受けると、READYに遷移してしまいます。
この辺がμITRON仕様の「dly_tsk」と異なる所で、タスクがこのサービスコールから帰って来た時、その要因をリザルトコードで調べる処理が、場合に拠っては必要となります。
また、他タスク等からの起床要求を受けなかった時は、引数の相対時間が経過した後のシステムタイマーの更新タイミングで起床されます。
※「dly_tsk」は、自タスクの実行を引数の時間だけ遅延させ、時間が来たらREADYに遷移する。
リザルトコードとして取り得る値は、
E_OK:正常終了。起床要求を受けて待ち状態が解除された時、このリザルトコードが返ります。
E_TMOUT:ポーリング失敗(引数に TMO_POL(=0) を設定)、またはタイムアウト(相対時間が経過)した時、このリザルトコードが返ります。
ではサンプルプログラムを作成して、実際に体験してみましょう。
コンパイラの設定は、
SYSTIMEを有効
config.cの設定は、
tsk01:優先度1、起動時READY
tsk02:優先度2、起動時READY
SYSTIM_CYCLIC_TIMは10
ユーザー初期化関数uinitの設定は、
システムクロック10MHz
Raタイマー割り込み周期10ms
/***********************************/
/*** reset process ***/
/***********************************/
void uinit(void)
{
/* initialize */
pd2 = 0xff;
/* Processor clock init */
init_clock();
/* systime initialize */
systim_init();
/* cyclic timer initialze */
init_timerRA();
}
tsk01、tsk02
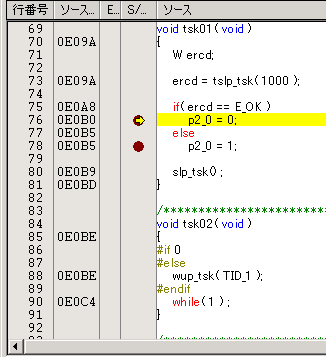
void tsk01( void )
{
W ercd;
ercd = tslp_tsk( 1000 );
if( ercd == E_OK ) /*起床要求を受けた時*/
p2_0 = 0; /*ここにブレークポイントを設定*/
else /*タイムアウトした時*/
p2_0 = 1; /*ここにブレークポイントを設定*/
slp_tsk() ;
}
void tsk02( void )
{
#if 1
#else
wup_tsk( TID_1 );
#endif
while( 1 ) ;
}
オンチップデバッカーを起動し、tsk02の#if~#else文の条件を変更して、tsk01のブレークポイントのどちらで停止するか試してみて下さい。
まずtsk01が先に起動し、tslp_tskで時間を設定した上で、WAITに遷移しています。
次にtsk01がWAITに遷移した為に,tsk02がREADYからRUNに遷移し、実行を始めます。
この時#if 1ならば、何もせずに無限ループに入ります。
tsk01は何処からも起床要求を受けなかったので、タイムアウトでtslp_tskから抜けて来ます。
その結果、条件式のelse側の処理が行われる事となります。
#if 0とした時は、tsk02はtsk01の起床要求を発行します。
そうするとtsk01はWAITからREADYに遷移しますが、サービスコールの中で実行中のタスク(tsk02)と優先度が比較され、当然tsk01の方が優先度が高い事から、実行中のタスクが切り替えられるプリエンプトが発生し、その時のリザルトコードからE_OK側の処理が行われます。
やはりこれですね。(ループ中)

ITRONプログラミング入門―H8マイコンとHOSで始める組み込み開発
- 作者: 浜原 和明
- 出版社/メーカー: オーム社
- 発売日: 2005/04/25
- メディア: 単行本
2007-05-12 12:25
nice!(0)
コメント(0)
トラックバック(0)

SHOPリンク
μALFAT+H8/Tiny ファイルシステム評価ボード
MSP430-CQ ベースボード
MSP430-CQ ベースボード用デバックアダプター
MSP430F201xベースボード
14pinフラットケーブル
SH2/Tiny(STK-7125)応援企画 28pinソケットヘッダー
パスワールド販売ページ
TACどすえ
お勧め技術書籍
マイコン関係の書籍
Navajo Webカメラ
 |



コメント 0