Arduinoで赤外線リモコンコードを読み出す 家庭でできるIoT! 4パルス目 [ESP32]
 前回ちらっと書いたリモコンコードの受信です。
前回ちらっと書いたリモコンコードの受信です。秋月電子で売られている赤外線受光素子( http://akizukidenshi.com/catalog/g/gI-04659/ )をデータシート通りに抵抗、コンデンサ等を接続し、OUT端子をESP8266に接続します。
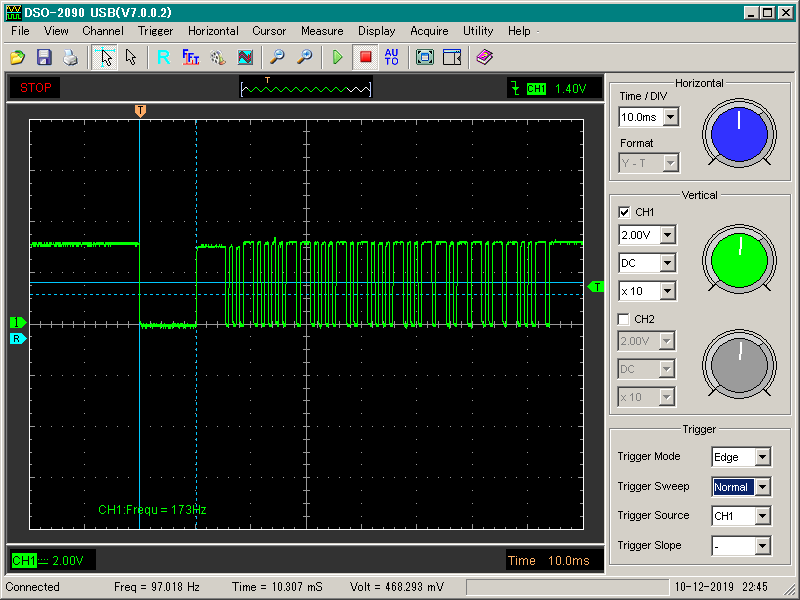
この受光素子はサブキャリアを検出するとLowを出力、サブキャリアが無ければHigh(HI-Z)です。
ESP8266側では端子割込みを使ってLowやHighの時間を測定し、時間をビットに換算します。
比較的簡単な処理ですが、悩むのがフレームの終了検出で、NECフォーマットであればビット数は固定長ですが、AEHAフォーマットの場合はビット数は可変長となるので、どこまで取り込んで良いのか判りません。
ですがフレーム間の間隔は必ず空く仕様なので、時間でフレームの終端を強制的に決めてしまう事としました。
とは言え三菱のエアコンのリモコンコードはデータ部が18byte有り、もし全ビットが1であればフレーム長は250msを超えてしますので、いかがなものか?と思わないでもないですが、、、
まぁリモコンコードを見るだけの処理なので、細かい事は気にしません。
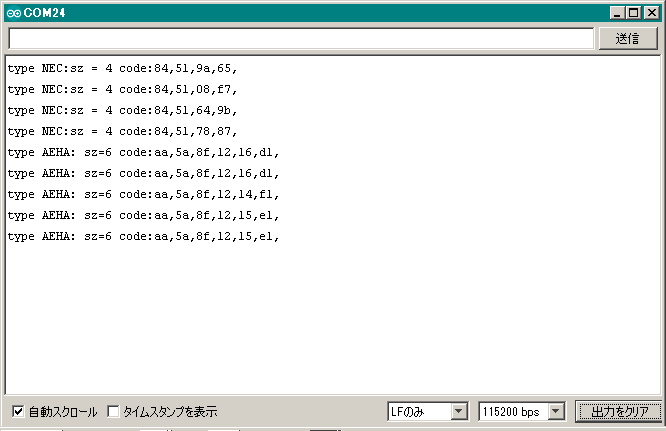 実際にスケッチを組んで読み出したものです。オーデリックのリモコンとアクオスのリモコンを受信しています。
実際にスケッチを組んで読み出したものです。オーデリックのリモコンとアクオスのリモコンを受信しています。オーデリックは前出の様にNECフォーマットです。アクオスはAEHAフォーマットでした。このリモコンコードはメーカーが仕様で示したものではなく、あくまでも自分で解析したコードである事に十分注意して下さい。仮に他のプログラムでこのコードを送信しても上手くは行かないと思います。学習リモコンの様にする場合は、受信したコードを送信可能なプログラムが別途必要です。なお、前回のプログラムでは使えます。
#include <ESP8266WiFi.h>
void ICACHE_RAM_ATTR irRemocon_interrupt( void );
#define IR_CONT 12 /* Ir LED ON/OFF */
#define IR_RECV 13 /* Ir receive */
#define Max_IR_Bits_NEC 32
#define Max_IR_Bits_AEHA 256
#define NEC_HEADER_LOW_MIN_PERIOD 462UL
#define NEC_HEADER_LOW_MAX_PERIOD 662UL
#define AEHA_HEADER_LOW_MIN_PERIOD 350UL
#define AEHA_HEADER_LOW_MAX_PERIOD 500UL
unsigned long IR_Low_Time; // holds IR bursting time
unsigned long IR_High_Time; // holds IR high idling time
unsigned long Latest_Time_ms;
unsigned short IR_Data[Max_IR_Bits_AEHA] = {0,}; // holds the bit length of each data bit by micro-sec.
int IR_State;
int IR_Bit_Count;
bool IR_Active = false; // when true, the capturing IR data stream is valid
char IR_formatType;
void setup()
{
Serial.begin( 115200UL );
Serial.println( "\r\n\r\nIR recieve code print out." );
pinMode( IR_RECV, INPUT_PULLUP );
attachInterrupt( IR_RECV, irRemocon_interrupt, CHANGE );
}
void loop()
{
if( IR_Active )
{
if( IR_formatType == 'N' && (millis() - Latest_Time_ms) >= 18UL )
{
if( irRemocon_available() >= 4 ) IR_nec();
irRemocon_init();
}
else if( IR_formatType == 'A' && (millis() - Latest_Time_ms) >= 10UL )
{
if( irRemocon_available() >= 6 ) IR_aeha();
irRemocon_init();
}
}
}
/*************************************************************************/
/* int to hexadecimal */
/*************************************************************************/
char *itoh( char *dst, unsigned int value )
{
sprintf( dst, "%02x", value );
return dst;
}
/*************************************************************************/
/* IR_REMOCON初期化 */
/*************************************************************************/
void irRemocon_init( void )
{
IR_Active = false; // when 1, the capturing IR data stream is valid
IR_formatType = 0;
IR_State = 0;
}
/*************************************************************************/
/* データ数確認 */
/*************************************************************************/
int irRemocon_available( void )
{
if( IR_Active ) return IR_State / 8;
return 0;
}
/*************************************************************************/
/* NECタイプのデータ受信 */
/*************************************************************************/
int irRemocon_rxNEC( byte dst[], int size )
{
int index = 0;
for( int i = 0; i < Max_IR_Bits_NEC; i++ )
{
dst[index] >>= 1;
if ( IR_Data[i] > ((NEC_HEADER_LOW_MIN_PERIOD + NEC_HEADER_LOW_MAX_PERIOD) / 2) * 3 )
dst[index] |= 0x80;
if( (i % 8) == 7 ) index++;
}
return index;
}
/*************************************************************************/
/* AEHAタイプのデータ受信 */
/*************************************************************************/
int irRemocon_rxAEHA( byte dst[], int size )
{
volatile int limit = IR_State;
int index = 0;
for( int i = 0; i < limit; i++ )
{
dst[index] >>= 1;
if ( IR_Data[i] > ((AEHA_HEADER_LOW_MIN_PERIOD + AEHA_HEADER_LOW_MAX_PERIOD) / 2) * 3 )
dst[index] |= 0x80;
if( (i % 8) == 7 ) index++;
}
return index;
}
/****************************************************************************/
/* IR RECEIVE for NEC format */
/****************************************************************************/
void IR_nec( void )
{
int sz = irRemocon_available();
byte *iRData = new byte[sz];
sz = irRemocon_rxNEC( iRData, sz );
String str = "";
char asc[8];
for(int i = 0; i < sz; i++)
{
str += itoh(asc,(unsigned int)iRData[i]);
str += ",";
}
delete[] iRData;
if( str.length() > 0 )
{
Serial.print( "type NEC:sz = " ); Serial.print( sz, DEC );
Serial.print( " code:" ); Serial.println( str );
}
}
/****************************************************************************/
/* IR RECEIVE for AEHA format */
/****************************************************************************/
void IR_aeha( void )
{
int sz = irRemocon_available();
byte *iRData = new byte[sz];
sz = irRemocon_rxAEHA( iRData, sz );
char buf[8];
String str = "";
for(int i = 0; i < sz; i++)
{
str += itoh(buf,(unsigned int)iRData[i]);
str += ",";
}
delete[] iRData;
if( str.length() > 0 )
{
Serial.print( "type AEHA: sz=" ); Serial.print( sz, DEC );
Serial.print( " code:" ); Serial.println( str );
}
}
/*************************************************************************/
/* IR_REMOCON割り込み */
/*************************************************************************/
void ICACHE_RAM_ATTR irRemocon_interrupt( void )
{
if( digitalRead( IR_RECV ) == LOW ) // edge is low.
{
if( IR_Active ) //LOWからLOWまでの時間を計測して配列に保存する
{
unsigned long period = micros() - IR_Low_Time;
if( IR_formatType == 'N' &&
period >= NEC_HEADER_LOW_MIN_PERIOD * 2 && period <= NEC_HEADER_LOW_MAX_PERIOD * 4 )
{
if( IR_State < Max_IR_Bits_NEC )
{
IR_Data[IR_State++] = (unsigned short)period;
IR_Bit_Count = IR_State;
Latest_Time_ms = millis();
}
else irRemocon_init();
}
else if( IR_formatType == 'A' &&
period >= AEHA_HEADER_LOW_MIN_PERIOD * 2 && period <= AEHA_HEADER_LOW_MAX_PERIOD * 4 )
{
if( IR_State < Max_IR_Bits_AEHA )
{
IR_Data[IR_State++] = (unsigned short)period;
IR_Bit_Count = IR_State;
Latest_Time_ms = millis();
}
else irRemocon_init();
}
}
IR_Low_Time = micros();
}
else // edge is high.
{
unsigned long period = micros() - IR_Low_Time;
if( period >= NEC_HEADER_LOW_MIN_PERIOD * 8 ) // NECフォーマット
{
IR_Active = true;
IR_State = 0;
IR_High_Time = millis(); //先頭フレームの後半の時間となる
IR_formatType = 'N';
Latest_Time_ms = millis();
}
else if( period >= AEHA_HEADER_LOW_MIN_PERIOD * 8 ) // 家製協(AEHA)フォーマット
{
IR_Active = true;
IR_State = 0;
IR_High_Time = millis(); //先頭フレームの後半の時間となる
IR_formatType = 'A';
Latest_Time_ms = millis();
}
else {}
}
}

- 出版社/メーカー: スイッチサイエンス(Switch Science)
- メディア: おもちゃ&ホビー

オーデリック LEDシーリングライト リモコン付き LED一体型 電球色~昼光色 調光・調色タイプ ~12畳 SH8237LDR
- 出版社/メーカー: オーデリック
- メディア: ホーム&キッチン

オーデリック LEDシーリングライト リモコン付き LED一体型 電球色~昼光色 調光・調色タイプ ~14畳 SH8234LDR
- 出版社/メーカー: オーデリック
- メディア: ホーム&キッチン
2019-12-09 16:06
nice!(0)
コメント(0)

SHOPリンク
μALFAT+H8/Tiny ファイルシステム評価ボード
MSP430-CQ ベースボード
MSP430-CQ ベースボード用デバックアダプター
MSP430F201xベースボード
14pinフラットケーブル
SH2/Tiny(STK-7125)応援企画 28pinソケットヘッダー
パスワールド販売ページ
TACどすえ
お勧め技術書籍
マイコン関係の書籍
Navajo Webカメラ
 |



コメント 0