Arduino AVRでマルチタスクしてみる タスク2 [ATmarquino Arduino]
ファイル名を変えずに中身を書き換えちゃったのは、まずかったかなぁ、、、
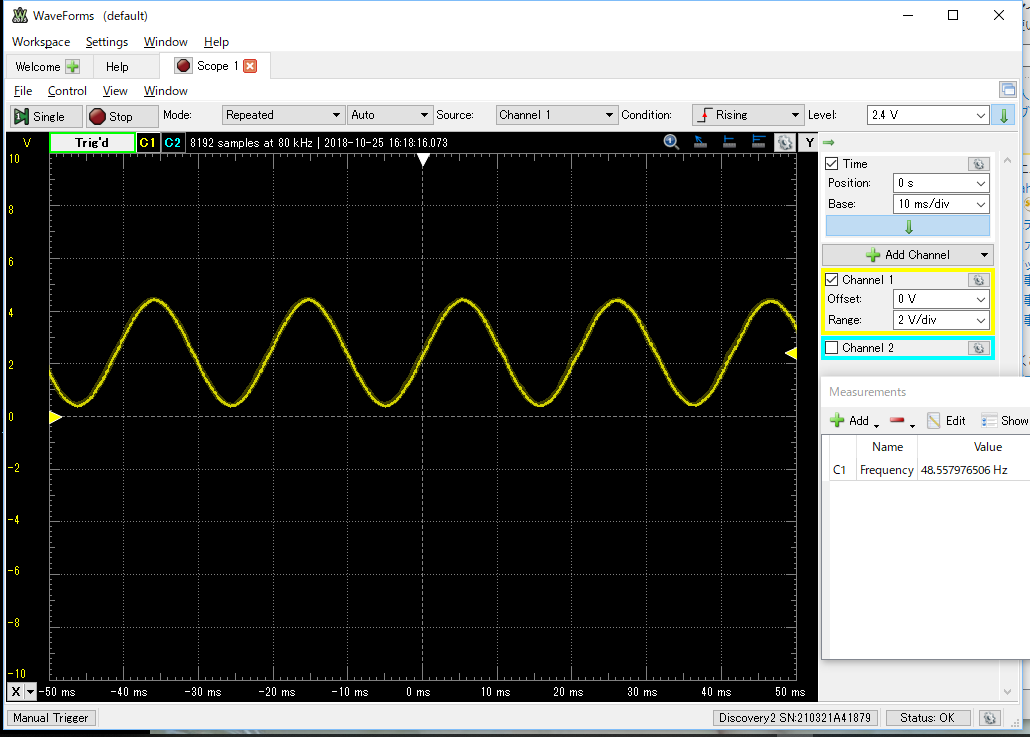
マルチタスクのサンプルとして、PWMで50Hzのサイン波を出力するデモ。
別途用意したスイッチを押す度に別途用意したLPFを通してサイン波が出力される。ただし10秒間掛けて波形はフェードアウトする。
/**********************************************************/
/* マルチタスクやってみる */
/* PWMで50hzのサイン波を出力する。10秒掛けてフェードアウト。 */
/**********************************************************/
#include <avr/io.h>
#include <FlexiTimer2.h>
#include "delivertive.h"
extern "C"
{
#include "mul_tsk.h"
}
/**********************************************************/
/* prototypes */
/**********************************************************/
void tsk_ini( void );
void stackMonitor( void );
void switchScanTask( void );
void pwmGenerateTask( void );
/**********************************************************/
/* valiables */
/**********************************************************/
SYSTIM systim; // 1msでインクリメントする変数
uint8_t tsk0_stk[ 128 * 1 ];
uint8_t tsk1_stk[ 128 * 1 ];
uint8_t tsk2_stk[ 128 * 1 ];
#define PWM_PIN 10
#define TRIGGER_PIN 2
#define LED_PIN 13
#define TIMER_COUNTER_CLOCK (8 * 1000000UL)
#define PWM_FREQUENCY (10 * 1000)
#define RESOLUTION (40) /* 50hz * 40 over sampling. */
#define DELTA_SLOPE (1.0f / 500)
int scale = TIMER_COUNTER_CLOCK / PWM_FREQUENCY / 2; /* 1000000 is timer clock */
int offset = TIMER_COUNTER_CLOCK / PWM_FREQUENCY / 2; /* center position */
int waveTableCounter;
float slope = 1.0f - DELTA_SLOPE; /* 10s = 20ms * 500 */
int originalWaveTable[ RESOLUTION ];
unsigned int waveTable[ RESOLUTION ];
unsigned char switchScanUpdate;
unsigned long timer1CompbIsrCounter;
bool conversionStart = false;
/**********************************************************/
/* setup */
/**********************************************************/
void setup()
{
Serial.begin( 115200UL );
Serial.println( "AVR Multi Task Demo." );
/* ststem and pwm update timer start. */
FlexiTimer2::set( 5, 1.0f / 10000, pwmUpdateHandler );
FlexiTimer2::start();
tsk_ini(); //タスクの初期化
sta_rdq( ID_monitor ); //ラウンドロビン開始。ここからタスクが開始される
}
/**********************************************************/
/* loop ※使われない */
/**********************************************************/
void loop()
{
}
/**********************************************************/
/* タスク初期化 */
/**********************************************************/
void tsk_ini( void )
{
reg_tsk( ID_monitor, (void *)stackMonitor, (void *)tsk0_stk, sizeof(tsk0_stk), 0,0,0,0 );
reg_tsk( ID_switchScan, (void *)switchScanTask, (void *)tsk1_stk, sizeof(tsk1_stk), 0,0,0,0 );
reg_tsk( ID_pwmGenerate, (void *)pwmGenerateTask, (void *)tsk2_stk, sizeof(tsk2_stk), 0,0,0,0 );
sta_tsk( ID_monitor );
// sta_tsk( ID_switchScan );
// sta_tsk( ID_pwmGenerate );
}
/**********************************************************/
/* stack monitor task */
/**********************************************************/
static unsigned int RemainStack( void *stk, unsigned int sz );
static void stackPrint( const char *msg, void *stk, unsigned int sz );
void stackMonitor( void )
{
sta_tsk( ID_pwmGenerate );
while( 1 )
{
dly_tsk( 10 * 1000UL );
stackPrint( "task1 stack : ", tsk1_stk, sizeof(tsk1_stk) );
stackPrint( "task2 stack : ", tsk2_stk, sizeof(tsk2_stk) );
stackPrint( "monitor stack : ", tsk0_stk, sizeof(tsk0_stk) );
}
}
static void stackPrint( const char *msg, void *stk, unsigned int sz )
{
Serial.print( msg );
Serial.print( RemainStack( stk, sz ), DEC );
Serial.print( "/" );
Serial.println( sz, DEC );
}
static unsigned int RemainStack( void *stk, unsigned int sz )
{
unsigned int i;
char *ptr = (char *)stk;
for( i = 0; i < sz; i++ )
{
if( *ptr++ != 0 ) break;
}
return sz - i;
// return i;
}
/**********************************************************/
/* switchScanTask */
/**********************************************************/
void switchScanTask( void )
{
pinMode( TRIGGER_PIN, INPUT_PULLUP );
unsigned char sw = 0x00;
while( 1 )
{
sw <<= 1;
if( digitalRead( TRIGGER_PIN ) == LOW ) sw |= 1;
if( (sw & 0x0f) == 0x07 )
{
switchScanUpdate++;
}
dly_tsk( 50UL );
}
}
/**********************************************************/
/* PWM Generate Task */
/**********************************************************/
void pwmGenerateTask( void )
{
pinMode( PWM_PIN, OUTPUT );
digitalWrite( LED_PIN, LOW );
pinMode( LED_PIN, OUTPUT );
/* wave table generate. */
for( int i = 0; i < RESOLUTION; i++ )
{
int tempI = (int)(sin( 2 * M_PI * i / RESOLUTION) * scale);
originalWaveTable[ i ] = tempI;
waveTable[ i ] = (unsigned int)tempI + offset;
Serial.print( waveTable[ i ], DEC );
Serial.print( "," );
if( (i % 10) == 9 ) Serial.println();
}
/* start switch scan task. */
sta_tsk( ID_switchScan );
while( 1 )
{
/* wait for switch pushed. */
unsigned char switchScanUpdateBase = switchScanUpdate;
while( switchScanUpdateBase == switchScanUpdate ) dly_tsk( 50UL );
switchScanUpdateBase = switchScanUpdate;
Serial.println( "pwmGenerateTask PWM start." );
/* timer counter initialize. */
TCCR1B = 0x00; // timer1 stop
TCNT1 = 0x0000; // 16bit counter clear
TIMSK1 = 0x00; // interrupt disable
TCCR1A = 0b00100011; // 0b00 10 00 11
// OC1A : normal port and not connected OC1A.
// OC1B : compare match goes OC1B to clear and top goes OC1B to set.
// fast PWM and top is OCR1A.
TCCR1B = 0b00011001; // 0b0 0 0 11 001
// fast PWM and top is OCR1A.
// clkIO / 1 priscaller.
OCR1A = (unsigned int)(TIMER_COUNTER_CLOCK / PWM_FREQUENCY);
OCR1B = waveTable[ 0 ];
TIMSK1 = 0x00;
/* interrupt timer start. */
slope = 1.0f - DELTA_SLOPE;
waveTableCounter = 1;
conversionStart = true;
digitalWrite( LED_PIN, HIGH );
/* wait 10s. */
dly_tsk( 11 * 1000UL );
conversionStart = false;
for( int i = 0; i < RESOLUTION; i++ )
{
int tempI = originalWaveTable[ i ];
waveTable[ i ] = (unsigned int)tempI + offset;
}
Serial.println( "pwmGenerateTask PWM stop." );
digitalWrite( LED_PIN, LOW );
}
}
/**********************************************************/
/* pwm update handler */
/**********************************************************/
void pwmUpdateHandler()
{
static int count = 0;
/* system timer update */
if( count & 1 ) systim += 1UL;
count++;
if( conversionStart == true && slope >= 0.0f )
{
OCR1B = waveTable[ waveTableCounter ];
float tempF = (float)originalWaveTable[ waveTableCounter ] * slope;
waveTable[ waveTableCounter ] = (unsigned int)tempF + offset;
if( ++waveTableCounter >= RESOLUTION )
{
waveTableCounter = 0;
slope -= DELTA_SLOPE;
}
}
}
2018-10-25 16:17
nice!(0)
コメント(0)

SHOPリンク
μALFAT+H8/Tiny ファイルシステム評価ボード
MSP430-CQ ベースボード
MSP430-CQ ベースボード用デバックアダプター
MSP430F201xベースボード
14pinフラットケーブル
SH2/Tiny(STK-7125)応援企画 28pinソケットヘッダー
パスワールド販売ページ
TACどすえ
お勧め技術書籍
マイコン関係の書籍
Navajo Webカメラ
 |



コメント 0