ATmarquinoでMhysicalna(身近な)コンピューティング 初めてのドキドキモーターコントロール [ATmarquino Arduino]
|
|
あの頃って現在みたくFET使ってPWM制御なんて無かったから、基本的にサーボにスライド抵抗が連動していて、それでスピードをコントロールしていたんだけれど、やっぱり稼働時間が短かったんだよね。7.2Vのニッカド電池パック一本で20分位しか走れなくて、中学生だからお金無いので予備の電池パックとか持てなくて、一回走行したら終了とか、、、。
友人はスライド抵抗の代わりにでっかいリレーを入れたんだけれど、当然コントロールがON/OFFしか無くって、スタートからマブチの540モーターの巨大トルクをドッカーンと効かせて、でもそんなピーキーな特性では曲がれないってば。
ははは、何もかもが懐かしい。
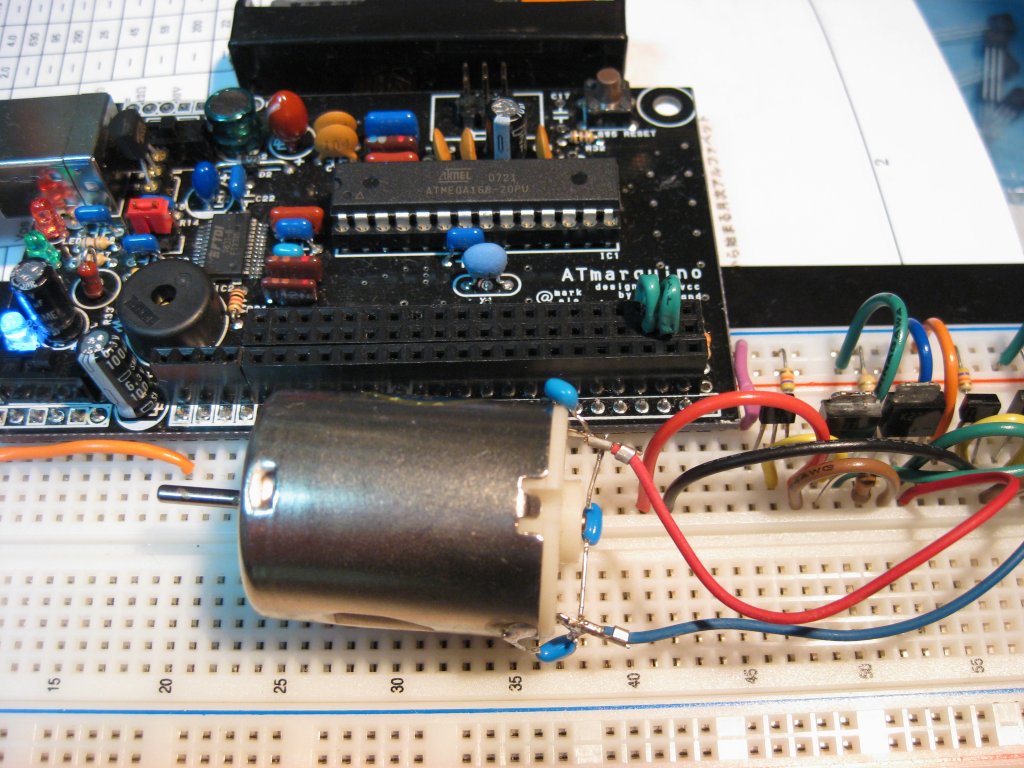
久しぶりにモーターなんて触るから、検索して以下のサイトを参考にさせていただきました。有難うございます。
http://www.picfun.com/motorframe.html:ここ後閑さんのサイトですね。
http://www.geocities.jp/mimiin/tips/fet/fet.html:先に見つけたのはこちら。
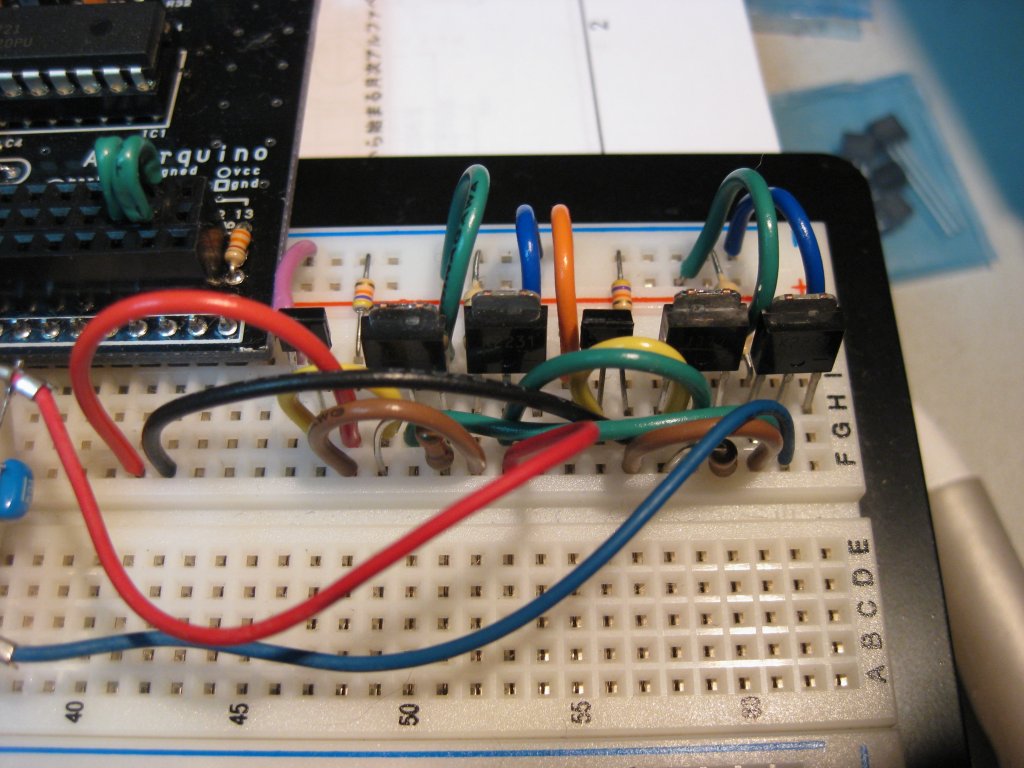
FETは比較的近所のサトー電気さんで全部揃いました。
Arduinoの標準のライブラリであるアナログ出力は簡単でいいですね。
スケッチは以下の様になっています。シリアルからFとかRとかSとか受けて方向と速度を制御しています。
/****************************************************************************/
/* モーターコントロール第一段 */
/****************************************************************************/
#define FORWARD 10
#define REVERSE 11
/****************************************************************************/
/* 変数定義 */
/****************************************************************************/
static const int speed[] =
{
0,85,95,105,125,145,165,190,215,240,255,
};
/****************************************************************************/
/* プロトタイプ宣言 */
/****************************************************************************/
/****************************************************************************/
/* 初期化処理 */
/****************************************************************************/
void setup() // run once, when the sketch starts
{
analogWrite( FORWARD, 0 ); //一度停止させる
analogWrite( REVERSE, 0 ); //一度停止させる
Serial.begin( 38400 ); //ボーレートは38400bpsとする
}
/****************************************************************************/
/* main?処理 */
/****************************************************************************/
void loop()
{
int c;
static int fval,rval;
if( Serial.available() > 0 )
{
c = Serial.read();
if( c == 'f' || c == 'F' )
{
if( rval > 0 )
{
rval = 0;
analogWrite( FORWARD, 0 ); //一度停止させる
analogWrite( REVERSE, 0 ); //一度停止させる
delay( 5 );
}
if( c == 'f' )
{
if( ++fval >= sizeof(speed) / sizeof(speed[0]) ) fval = (sizeof(speed) / sizeof(speed[0])) - 1;
}
else
{
if( --fval < 0 ) fval = 0;
}
analogWrite( FORWARD, speed[ fval ] ); //前進
Serial.print( 'F',BYTE );
Serial.print( speed[ fval ],DEC );
Serial.print( '\n',BYTE );
}
else if( c == 'r' || c == 'R' )
{
if( fval > 0 )
{
fval = 0;
analogWrite( FORWARD, 0 ); //一度停止させる
analogWrite( REVERSE, 0 ); //一度停止させる
delay( 5 );
}
if( c == 'r' )
{
if( ++rval >= sizeof(speed) / sizeof(speed[0]) ) rval = (sizeof(speed) / sizeof(speed[0])) - 1;
}
else
{
if( --rval < 0 ) rval = 0;
}
analogWrite( REVERSE, speed[ rval ] ); //後退
Serial.print( 'R',BYTE );
Serial.print( speed[ rval ],DEC );
Serial.print( '\n',BYTE );
}
else if( c == 's' )
{
analogWrite( FORWARD, 0 ); //一度停止させる
analogWrite( REVERSE, 0 ); //一度停止させる
fval = rval = 0;
Serial.print( "STOP\n" );
}
else ;
}
}

- 作者: Massimo Banzi
- 出版社/メーカー: オライリージャパン
- 発売日: 2009/03/27
- メディア: 単行本(ソフトカバー)

Make: Technology on Your Time Volume 06
- 作者:
- 出版社/メーカー: オライリージャパン
- 発売日: 2009/03/27
- メディア: 大型本

超低コスト インターネット・ガジェット設計―USB・μIP・microSDプロトコールスタックの活用
- 作者: 武藤 佳恭
- 出版社/メーカー: オーム社
- 発売日: 2008/05
- メディア: 単行本
2009-04-11 22:47
nice!(0)
コメント(0)
トラックバック(0)

SHOPリンク
μALFAT+H8/Tiny ファイルシステム評価ボード
MSP430-CQ ベースボード
MSP430-CQ ベースボード用デバックアダプター
MSP430F201xベースボード
14pinフラットケーブル
SH2/Tiny(STK-7125)応援企画 28pinソケットヘッダー
パスワールド販売ページ
TACどすえ
お勧め技術書籍
マイコン関係の書籍
Navajo Webカメラ
 |



コメント 0